简单介绍
TSDF其实应该叫T-SDF,SDF是有向距离场,T是截断的意思,TSDF相比原来的SDF减少了很多计算量。TSDF融合就是将所有点云数据加入一个体素中,计算相关体素中的SDF值,然后构建等值面,最终得到网格模型。这种方法表达等值面的方法可以归类为隐式表达。
TSDF重建网上有很多博客介绍,比如这篇博客3D Reconstruction——TSDF volume reconstruction。细节部分不详细展开,然后讲讲和博客中不一样的部分吧。
当我们进行无需点云的重建的时候,将每个点的影响范围变为以该点所在Voxel为中心的3X3X3或者5X5X5的范围的Voxel,这样能通过少量点云融合出等值面。计算SDF值的公式为
上式子中p是输入的点坐标,v是voxel的中心点,n为p点的法向(需要单位化)。
然后更新每个体块的中的SDF值可以为 sum_sdf += sdf*w,然后记录每个体块中的权重 sum_w += w。当融合完所有的点后,每个voxel的ave_sdf = sum_sdf/sum_w。
后续用marching cube的方式抽取点云。即在每个有ave_sdf值的voxel中判断其x+1、y+1和z+1方向上的ave_sdf值,两者相乘小于0表示在这条边上有等值面穿过,就可以通过sdf值线性插值出相应的点。
最后将这些点连接成三角网格用的是标准的marching cube的方式。
标准的TSDF融合算法就是这样非常简单的算法,只要有一颗能并行的octree,其余关键代码加起来估计没有多少行。
缺陷
那么有没发现个问题,在x、y、z方向上插值点都是用同样的sdf值,这样做能使得重建出三角网格的表面很光顺(就是一个SDF值方向上的球),但是sdf表示的有向距离场,那么其实表示的是当前点在某个方向上离等值面的一个距离,如果取平均了那么我们想要的特征区域是不是消失了? 这里我们都没有考虑marching cube方式连接网格带来的特征退化(这个方向也有很多研究比较著名的就是居涛老师的DC算法《Dual contouring of hermite data》),单纯sdf值上就是一个特征退化。
还有用中心点云的法向去计算SDF值的方法其实还引入一个如何逼近等值面的问题,一般形式下逼近等值面有两种方式。
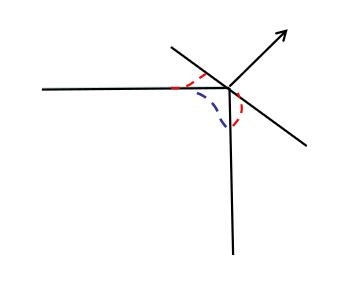
上图中红色是刚才介绍的SDF值求取的公式带来的影响,是一种外凸的逼近方式,还有一种是蓝色的求取的公式是内凹的,关于正确的SDF值求取还有很多可以研究,比如《Feature Sensitive Surface Extraction from Volume Data》就用一种粗暴的方式分别获得x、y、z分量上的不同sdf值,我将专门开一篇博客写关于SDF值计算的问题。当然在大多数情况下蓝色情况优于红色,红色的情况会使特征区域鼓起,像被圆润了一样,蓝色情况特征更加明显。
我本来不想写TSDF
水一篇TSDF融合,这个主要是人写的太多了,没必要重复,由于后续的RBF和HRBF重建都用到了,我就打个基础。